





















Tous les produits
-
Moteur à bobine mobile Vcm
-
moteur linéaire de bobine acoustique
-
Moteur rotatif à bobine mobile
-
Moteurs vibrants
-
Actionneur de bobine mobile linéaire
-
Actionneur de moteur linéaire
-
Entièrement déclencheur de bobine acoustique de Chambre
-
Moteur creux de noyau
-
Actionneur haute performance
-
Modules moteurs
-
moteur servo linéaire
-
contrôleur de moteur servo
Modules linéaires monomoteurs à haute vitesse et haute réactivité pour la vision artificielle





| Lieu d'origine | porcelaine, Suzhou |
|---|---|
| Nom de marque | SUPT MOTION |
| Certification | CE, ISO9001 |
| Numéro de modèle | Série MLCA |
| Quantité de commande min | 1 pièces |
| Prix | $225 |
| Détails d'emballage | Emballage personnalisé, etc. |
| Délai de livraison | 1-5 pièces, 5 jours. > 20 pièces, à négocier |
| Conditions de paiement | T/T |
| Capacité d'approvisionnement | À négocier |
Détails sur le produit
| Garantie | 3mois-1an | modularité | Conception modulaire |
|---|---|---|---|
| Taper | Système moteur modulaire | Nom de marque | SUPT-MOTION |
| Numéro de modèle | Les États membres doivent veiller à ce que les mesures prises soient conformes à l'article 6 du prés | Force maximale (N) | 120 |
| courant de pointe ((Ampères) | 4.2 | moteur linéaire ((ms) | 0,3 |
| Courant continu ((Ampères) | 1.4 | Rotor de poids | 0,42 kg |
| Force continue | 40 | Vitesse | Grande vitesse |
| Mettre en évidence | Modules de moteur linéaire à axe unique,Modules de moteur linéaire très réactifs,Modules moteurs linéaires de vision artificielle |
||
Description de produit
description du produit :
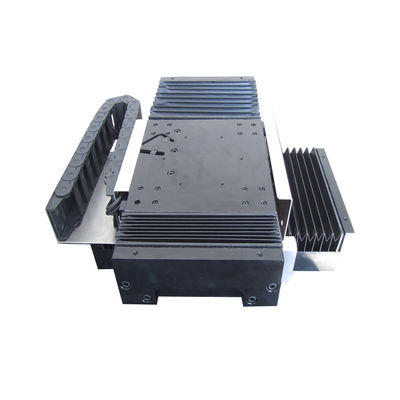
Le module de moteur linéaire utilise des moteurs linéaires SUPT équipés d'encodeurs optiques de haute précision, d'encodeurs magnétiques et de rails de guidage de haute précision, offrant aux clients une solution de mouvement linéaire idéale. Doté d'une conception compacte et modulaire, il offre un fonctionnement à haute vitesse, un mouvement fluide, une excellente stabilité, une haute précision, une longue durée de vie et un fonctionnement sans entretien. Course effective : 150 mm ; Précision de positionnement : ±2 µm ; Répétabilité : ±0,5 µm ; Rectitude : ±3 µm ; Vitesse maximale : 2 m/s ; Accélération maximale : 2 g. Grâce à une configuration optimale de l'encodeur et du rail de guidage, la précision de positionnement peut atteindre 0,1 à 5 µm.
Avec sa réponse dynamique élevée, sa haute précision, sa haute répétabilité, son erreur de transmission mécanique nulle et sa structure thermiquement stable, le module de moteur linéaire à axe unique est devenu une technologie d'entraînement de base pour les systèmes de vision industrielle, capable d'atteindre un positionnement sub-micronique et une détection synchrone à haute vitesse.
Les modules de moteur linéaire à axe unique peuvent être utilisés pour le balayage et le positionnement de caméras afin de déplacer précisément la caméra, lui permettant de scanner ou de capturer des images de l'objet testé, améliorant ainsi l'efficacité de l'inspection.
Sur les lignes de production automatisées, les modules de moteur linéaire à axe unique sont utilisés pour transporter les pièces en attente d'inspection, réalisant un positionnement précis pour garantir la précision de l'imagerie et de l'inspection.
Dans les systèmes d'inspection optique, ils sont utilisés pour entraîner des lentilles optiques ou des capteurs laser pour des ajustements précis, garantissant que le système d'inspection peut mesurer la zone cible avec une grande précision.
caractéristiques :
Le module de moteur linéaire est équipé d'un encodeur optique de haute précision, d'un encodeur magnétique et d'un guidage de haute précision.
Fonctionnement à haute vitesse, haute accélération, mouvement fluide, bonne stabilité et haute précision.
Configuration de l'encodeur et du guidage appropriés, précision de position jusqu'à 0,1-5 µm.
Précision de positionnement : ±2 µm, répétabilité : ±0,5 µm, rectitude : ±3 µm.
La structure de la plateforme peut être traitée et personnalisée selon les différentes exigences techniques des clients.
Paramètres du produit :
| Modules | T- | LC | 80 | -100 | A | 1 | 30 | ||||
| LC : La plaque a un moteur à noyau de fer | Poussée de pointe | Course : mm | A : Raster | 01 : 0,1 µm | Longueur de ligne du moteur : | ||||||
| LU : Moteur sans noyau de type U | B : Magnétique | 05 : 0,5 µm | 30 : 3 m | ||||||||
| 10 : 1 µm | |||||||||||
| Modules | T- | LC | 80 | -100 | A | 1 | 30 | ||||
| LC : La plaque a un moteur à noyau de fer | Poussée de pointe | Course : mm | A : Raster | 01 : 0,1 µm | Longueur de ligne du moteur : | ||||||
| LU : Moteur sans noyau de type U | B : Magnétique | 05 : 0,5 µm | 30 : 3 m | ||||||||
| 10 : 1 µm | |||||||||||
![]()
![]()
| Paramètres de performance du moteur linéaire | |||||||
| Série A -- MLCA (Dynamique) MLFA (Stator) | |||||||
| Modèle/Par | MLCA-0020-075-00 | MLCA-0040-135-00 | MLCA-0080-255-00 | ||||
| Force de pointe (Fp) | N | 60 | 120 | 240 | |||
| Courant de pointe (lp) | Ampères | 4,8 | 4,2 | 4,2 | |||
| Force continue (Fc) | N | 20 | 40 | 80 | |||
| Courant continu (lc) | Ampères | 1,6 | 1,4 | 1,4 | |||
| Constantes de l'actionneur (conversion moteur CC/3p) (Ka) | N/W | 5,65 | 7,9 | 11,2 | |||
| Poussée constante (L-L) (Kf) | N/Ampères | 15,3 | 30,4 | 60,3 | |||
| Constante de force contre-électromotrice (L-L) (Kb) | V/m/sec | 8,8 | 17,6 | 34,8 | |||
| Constante électrique (Te) | ms | 0,3 | 0,3 | 0,3 | |||
| Résistance (L-L) (R) | @25℃Ω | 4,8 | 9,4 | 19,2 | |||
| Inductance (L-L) (l) | mH | 1,51 | 3 | 6 | |||
| Coefficient de transfert de chaleur (Rth) | ℃/W | *3,9 | *1,9 | **1,3 | |||
| Température maximale de la bobine (Tmax) | ℃ | 120 | 120 | 120 | |||
| Pas de pôle de l'aimant (2T) | mm | 30 | 30 | 30 | |||
| Poids du mobile | Kg | 0,24 | 0,42 | 0,82 | |||
Application du produit :
Les principales applications des moteurs linéaires à axe unique :
1. Équipement de fabrication de semi-conducteurs, y compris l'équipement de fabrication de plaquettes et de conditionnement de puces.
2. Industrie des écrans plats (FPD), équipement de test de précision/fabrication de disques durs/fabrication de connecteurs/équipement de fabrication de plaques d'impression, etc.
3. Sciences de la vie, équipement médical, équipement d'inspection par vision industrielle et diverses occurrences d'équipement.
4. Placement SMT de composants électroniques, équipement de test de PCB, découpe laser, soudage et test.
5. Équipement de dispositifs logistiques.
![]()
![]()
produits recommandés